Контроллер шаговых двигателей c интерфейсом CAN SMSD‑4.2CAN
Если вы уже вдоволь насмотрелись видео на YouTube, перебрали в голове множество вариантов применения и уже твердо созрели сделать свой первый станок, думаю вам будет небезынтересно ознакомиться и с нижеприведенной информацией. Не стоит рассматривать эту статью как путь к решению конкретно вашей задачи — они ведь очень разные бывают, это скорее направление для размышления. Изначально я хотел кратко изложить свои рекомендации в виде одной статьи и уже в процессе написания пришел к пониманию, что все получается сухо и не обоснованно. Придется рассмотреть все по частям, и в этой статье я более подробно остановлюсь на драйверах.
")




")




")



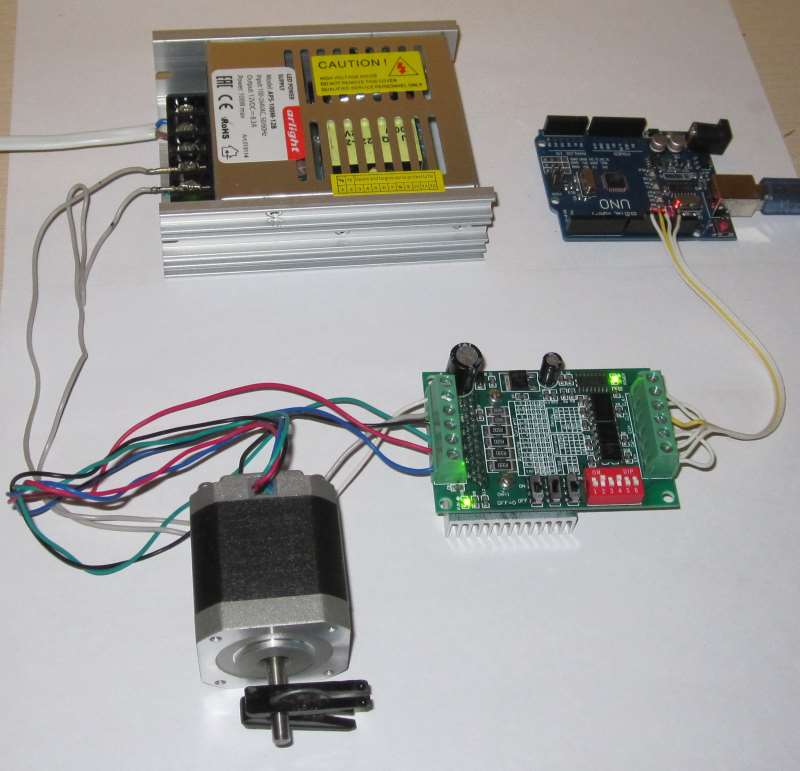
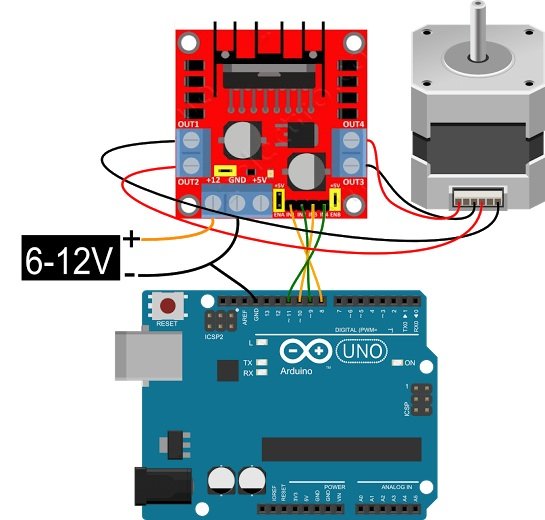
Привет, друзья! Предлагаю вам практический алгоритм, как правильно подключить обмотки шагового двигателя к драйверу. Начинающие, и не только, ардуинщики при работе с шаговыми двигателями часто сталкиваются с проблемой определения, где выводы первой обмотки, где второй, где начало первой обмотки, где второй. Так же часто возникает вопрос как проводами поменять направление вращения двигателя. Давайте в этом видео разберёмся, как с высокой степенью четкости подходить к решению этих вопросов. В идеальном случае нам может попасться широко известный тип шагового двигателя, у которого имеется стандартный неизменный клеммник, схему подключения которого легко найти в гугл-картинках.



Итак, вы определились, что для вашей системы нужен шаговый двигатель. Теперь пришло время решить, 2-фазный или 5-фазный. Кто сможет дать ответ? Мы остановимся на их сходстве и различии по таким параметрам как: разрешение, вибрация, крутящий момент, точность и синхронность.